This Is Why We Probably Haven't Encountered Alien Life Yet

If sci-fi is any indication, we ought to swimming in alien life by now. We've got the "I Want to Believe" gray aliens of The X-Files and numerous other Area 51-ish conspiracies, the post-scarcity neo-Enlightenment of Star Trek's Federation, Will Smith dogfighting with, and punching, hostile aliens in the power fantasy of 1996's Independence Day, aliens as robots (Transformers), aliens as cats (the Flerken from the MCU), and aliens as cute, endearing critters (E.T.). In real life, we've got the Hopi story of Chuhukon, the alien race in the Pleiades from which the tribe descended (per Montana Pioneer), modern "starseed" myths about humans incarnated on Earth from, yet again, the Pleiades and other planets (per the Global Community Communications Alliance), and many more examples. The list just doesn't end.
So where does this obsession with alien life come from? Is it sheer terror of being truly alone in the cosmos, responsible unto ourselves, without a savior, in an increasingly atomized, existentially senseless world? Is it the typical, evolutionary fear of "the other" coming to take our stuff? Or is it just a way to self-narrate and explore aspects of ourselves?
In fiction, encountering an alien race typically does one of two things: annihilate humanity and shatter our most cherished visions of the sacred, or elevate us to a greater, selfless awareness via something like Trekdom's First Contact. As it turns out, though, we might not need to worry. The Fermi Paradox illustrates how we may, in fact, be utterly alone.
Calculating the number of exoplanets using the Drake Equation
Understanding Fermi's Paradox begins with the Drake Equation, which was developed by astronomer Frank Drake in 1961 at the inception of the SETI (Search for Extraterrestrial Life) Institute. For 60 years SETI has used the Drake Equation as a guiding principle to explore the galaxy, not through "climbing into rockets and zipping off to other planetary systems," as the SETI website puts it, but through detecting signs of life such as electromagnetic radiation, radio signals, and so on.
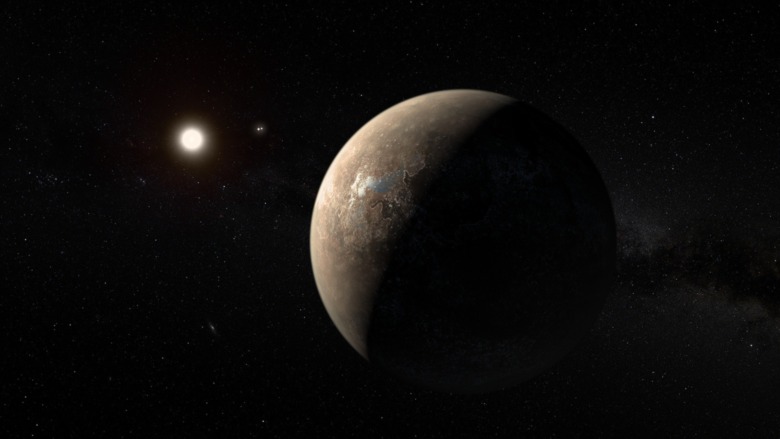
Simply put, the Drake Equation is a way to measure the probable number of alien civilizations that may exist in our galaxy. This is an important step before we start planning a welcome party for the six-eyed star-druids from Proxima b, the closest exoplanet at 4.2 light years away, as Space says.
NASA has a good depiction of the Drake Equation, written as N = R* fp ne fl fi fc L, where "N" is the number of alien civilizations technologically advanced enough to become spacefaring, and thereby possibly encounter us. The equation's factors address common-sense questions like, "How many life-supporting planets exist in suitably habitable distances from stars?" But, it also avoids answer glaring, problematic questions like, "Would intelligent alien life necessarily care about anything off-world?" "Would such life even feel the need to develop itself, technologically?"
Regardless, the Alien Civilization Calculator uses the Drake Equation to posit somewhere between 36 and 928 spacefaring civilizations in the Milky Way.
Where are all the aliens? Fermi asked
So then: Where my aliens? This was the question asked by Enrico Fermi, the man after whom Fermi's Paradox is named, over a lunchtime conversation in 1950, as Space says. Basically, Fermi's Paradox is more of a thought experiment: If the universe is supposed to be teeming with life, then where are all the aliens? Or at least, where are the remnants of other, even millions-years-dead spacefaring civilizations? He estimated that 10 million years is all it would take to expand through the entire galaxy (a blip in the age of the cosmos, provided a civilization survives that long — more on that later).
Fermi wasn't the first to pursue this line of questioning, which if you think about it, isn't a paradox at all. The absence of evidence is not the evidence of absence, as they say; nothing paradoxical about that. "We don't have an answer, therefore no answer" is a ludicrous statement. And as a 2015 article in the journal Astrobiology states (posted at Cornell University's arXiv), astrophysicist Michael Hart predates Fermi in discussing Fermi's Paradox, so Fermi's Paradox isn't even Fermi's.
Nonetheless, Fermi keeps getting referenced in literature, and time has done nothing to dispel his "paradox." In fact, it really is looking less and less likely not that other civilizations exist, but that we'd run across them. Or maybe those guys on the History Channel are right: aliens already visited this place in the days of flint tools and thought, "Ooo, genetic experiment time!"
Separated by the dark energy-fueled expansion of the universe
To see why we'd be unlikely to encounter alien civilizations, we need to understand the scope of the universe. At recent estimates, as News Atlas says, the universe is composed of 31 percent matter, and 69 percent dark energy. Most matter is just constituent particles, not self-aware, multicellular, electrochemical entities like humans; space is called "space" for a reason. The universe is 13.8 billion years old, per Space, and only a very particular path created us.
And dark energy? Don't worry about it, because physicists don't know what it is, either, despite all advances in theory and astronomical measuring tools. It's some undefinable glue taking up negative space in, well, space, and contributing to the expansion of the universe. And yes, the universe itself is expanding, and at a rate faster than the speed of light (also per Space). We know this because of red shift, which as the European Space Agency says, happens when waveforms are stretched by the universe's expansion. More distant things appear red because their light took longer to reach us ("red" is a longer wavelength).
So even if the Drake Equation demonstrates that the galaxy is littered with aliens like grains of cosmically distant sand, but we humans are missing out on the beach party... Well, aliens might be able to send us an invitation, but that invitation might never reach us because it wouldn't travel fast enough to outpace the expansion of the universe.
Alien civilizations might have just destroyed themselves, anyway

So now we can get back to the doomsaying and alien invasions that much of sci-fi depicts. Even H.G Wells, one of the progenitors of science fiction as a genre, back in 1897 wrote War of the Worlds to liken humans to helpless animals in the face of a superior, "Martian" foe. The point was just "be kind to those less powerful." The story depicts the same extraplanetary version of human vs. human warfare we see time and again in sci-fi; just substitute planets for countries clashing over land grabs, political nonsense, self-destructive ideologies, and so on.
If we ascribe to aliens the same, sad, warlike pettiness, we encounter another issue, outlined in Science News. Our sun is pretty young as far as stars go, at 4.6 billion years old, per Space. Older stars would have generated planetary lifecycles far earlier than ours. But what is the lifecycle of a typical civilization? Would an alien civilization exist long enough a) without destroying itself, or b) without evolving into a type of intelligence incomprehensible to us, and, c) still wanting to seek out other life? If not, then we're probably never going to meet.
But is all this preoccupation with alien life mere escapism? After all, as Carl Sagan said in his 1994 book Pale Blue Dot, "The Earth is the only world known so far to harbor life... Like it or not, for the moment the Earth is where we make our stand."